
 By Andrew Liszewski
By Andrew Liszewski
‘Better’ might actually be a bit of an understatement for this new artificial foot that’s been submitted to the US Patent & Trademark Office. Designed by researchers from MIT’s Biomechatronics Lab (how cool a name is that btw?) the new artificial foot attempts to mimic the “biomechanical behavior” of a real human foot as it moves through a walk cycle and over uneven terrain. Here’s the abstract that accompanied the patent application:
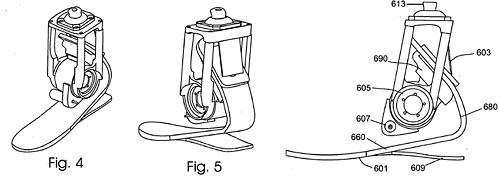
An artificial foot and ankle joint consisting of a curved leaf spring foot member that defines a heel extremity and a toe extremity, and a flexible elastic ankle member that connects said foot member for rotation at the ankle joint. An actuator motor applies torque to the ankle joint to orient the foot when it is not in contact with the support surface and to store energy in a catapult spring that is released along with the energy stored in the leaf spring to propel the wearer forward. A ribbon clutch prevents the foot member from rotating in one direction beyond a predetermined limit position, and a controllable damper is employed to lock the ankle joint or to absorb mechanical energy as needed.
It’s a bit heavy but what it basically means is that people using the artificial foot should have an easier time when it comes to walking on uneven terrain or when using stairs.
[ Artificial Foot Patent ] VIA [ New Scientist Invention Blog ]



